2024 is a special year to us as it marked a pivotal year for MapMIT as we transitioned from a slow, solo student project to a full scale FOSS project with a complete team of students and alumni guiding along every major step. The vision of creating a better, more intuitive and well designed campus map with interactive features and event tracking really started to take shape, establishing the foundation for what we will be working on as we go into the new year of 2025.
A fresh start
Starting July of 2024, MapMIT started as the flagship for @neehalasharrma‘s Open Horizon Robotics Manipal. This time the project would be made using a fully open source tech stack and will be completely open source as well. Learning from mistakes over the past year of attempting to make the map, remembering the technical difficulties faced in the previous attempt, and with Neehal overlooking the project, it is without a doubt that we made good progress.
QGIS Developments
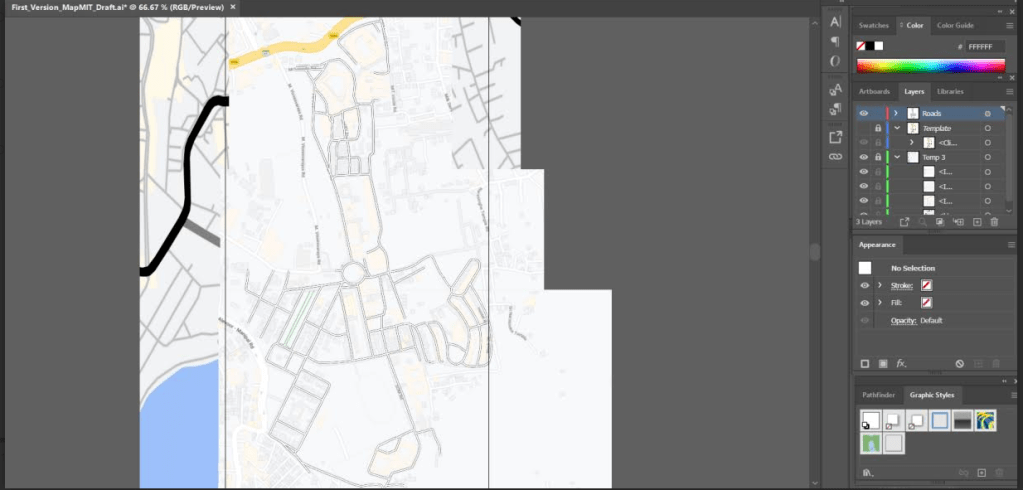
The core GIS elements of the map are designed from scratch using QGIS. We used satellite images from Maxar Technologies, Geo referenced existing maps of the campus over the coordinate reference system WGS: 84 EPSG : 3857 along with some physical surveys and successfully completed our first milestone of developing the map.
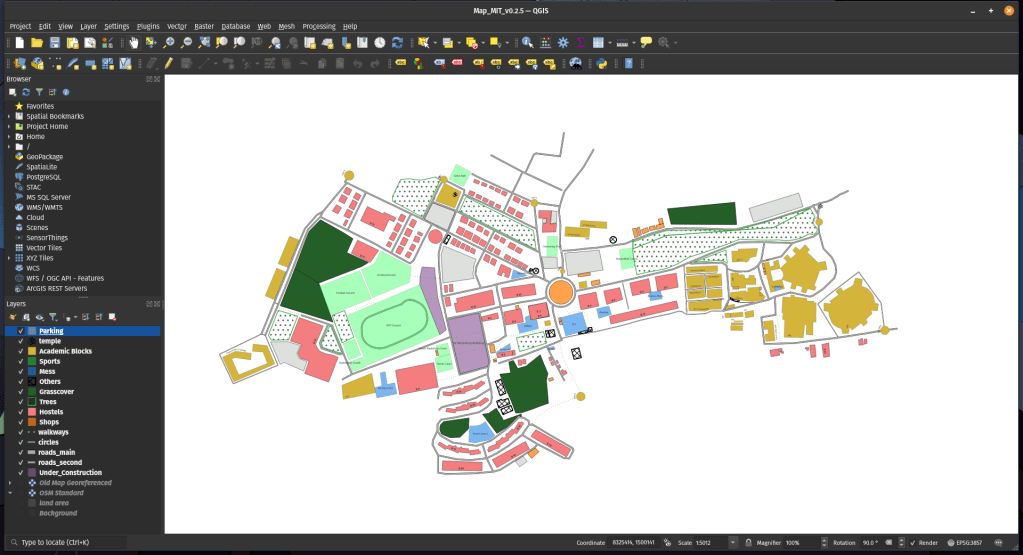
Phase 1: making a 2D static map is completed with:
- Detailed mapping of campus buildings, roads, and facilities
- Implementation of multiple layers for different data types
- Integration of correct coordinate systems for accurate spatial representation and minimal scaling issues.
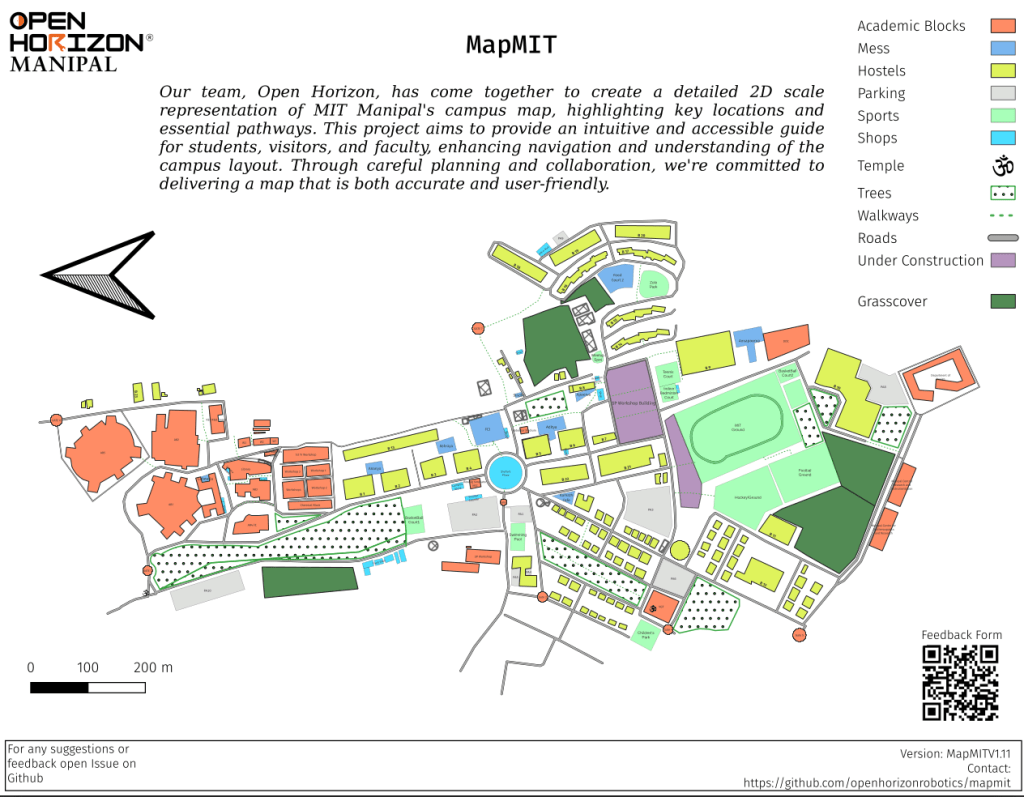
The map was published in the later half of the semester, and we loved the support and feedback we received for the initiative. We will be making revisions to the map on a periodic basis.
A New Horizon
The team also grew with the project going to higher levels with Mr. Arvind Kaushik, an alumni of Mechatronics ’23 of MIT joining in and sponsoring the project with a custom build open source quad copter drone. This opened a new horizon for the project as we expanded the project with a hardware division. The goal being to implement an automated surveying and mapping tool to:
- Automate the process of surveying large campuses and revising geographical changes/developments
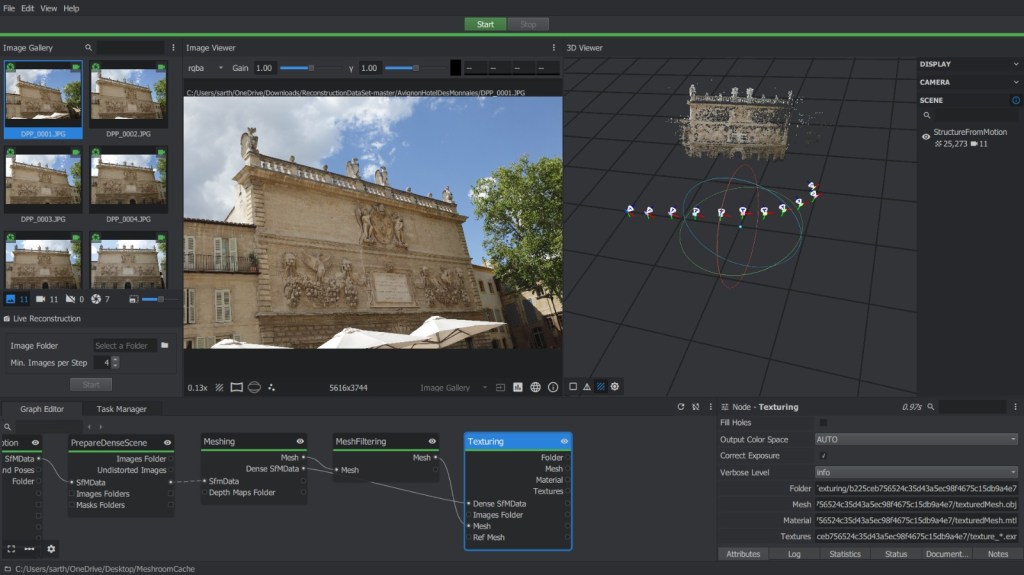
- Implementing a 3D layer of the campus map using a technique called photogrammetry.
We made significant progress with the drone being assembled successfully, and also successfully conducting test flights for validation.

Dr. Kapil Sadani and the Department of Instrumentation and Control Engineering also supported the project allowing us to get permissions to fly in campus and use the department labs.
Ongoing developments
We also applied to major research grants to secure funding and are hoping for a positive development in the upcoming semester. The Phase 2 of the Map: making an interactive implementation of the map is currently ongoing as we are expecting a working prototype to be ready by February and a full implementation by June 2025. The drone and photogrammetry development is also progressing steadily. Research and workflow testing for photogrammetry is on going and we are tentatively planning to make a prototype ready by end of February or Early March 2025.
The 2025 Development Timeline
In the first half of this semester we are planning on completing the implementation of the Web Map using OpenLayers and have a Minimum Viable Product (MVP) for the Interactive Features. The drone will also be undergoing further developments as we have to integrate some more features before it can be used for mapping. The Architecture for the automated mapping system will undergo further scrutiny as we prepare to publish a research paper around this aspect of the project. Mock prototypes of photogrammetry designs for MIT buildings are also to be made during this time. We will also be participating in Manipal Entrepreneurship Summit (MES) 2025!
The project will slow down in the second half of the semester and we will focus more on quality improvements and bug fixes over implementing more features. The data collection from the drone for photogrammetry and automation testing will also take place during this time.
We want to have the project’s interactive map ready by August 2025 to welcome the new batch of 2029 with our project and gain valuable feedback.
Looking Ahead
As we enter 2025, MapMIT and Open Horizon Manipal stands at an exciting intersection of technology and community impact. What began as a student initiative has evolved into a comprehensive open-source project that aims to reshape campus space management. The continued support from MIT Manipal, our growing team, and the wider community has been instrumental in our progress. We remain committed to our vision of creating an intuitive, efficient, and accessible solution for campus mapping and event management. With our two component approach combining web technology and drone-based mapping, we’re building not just for MIT Manipal, but for educational institutions everywhere keeping scalability in mind. We encourage the student community to take inspiration from this project and build more FOSS projects with real world utility and contribute to such projects in Campus. While you are at it, let Open Horizon be the support system to take your ideas to reality : )
Get Involved!
MapMIT is an open-source initiative, and we welcome contributions from students, developers, and enthusiasts. Whether you’re interested in GIS, web development, drone technology, or campus event management, there’s a place for you in our project. We are also open to collaborating with the Student Council, Student Projects and Clubs in MIT for their events especially when we deploy in August 2025.
Follow our progress:
- GitHub: https://github.com/openhorizonrobotics/mapmit
- Project Updates: https://www.linkedin.com/showcase/ohrmitmpl/
- Contact: https://www.linkedin.com/in/neehalsharrma OR https://www.linkedin.com/in/somvanshi/
Acknowledgments
This project wouldn’t have been possible without:
- Neehal’s technical oversight and guidance as BDFL
- Mr. Arvind Kaushik (MechX ’23) for the drone sponsorship and guidance in hardware.
- Open Horizon Robotics MapMIT team
- MIT Manipal administration and the Department of Instrumentation and Control for their continued support.
- Students who reached out with valuable feedback

Leave a reply to Nikhar Cancel reply